Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
Portfolio item number 1
Short description of portfolio item number 1
Portfolio item number 2
Short description of portfolio item number 2
projects
Control barrier functions
Control barrier functions for discrete-time systems with applications to robotics and aerospace systems 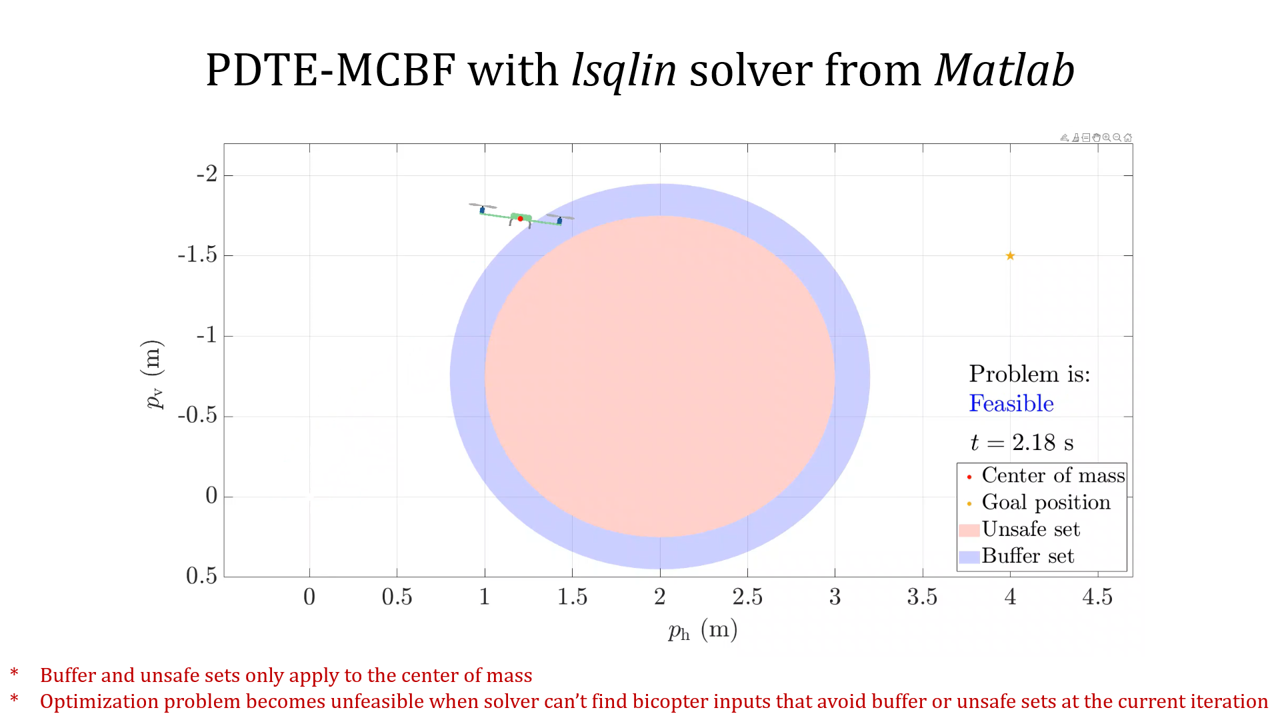
Optimization for controller synthesis
Controller Learning and Synthesis based on Control and Trajectory Optimization 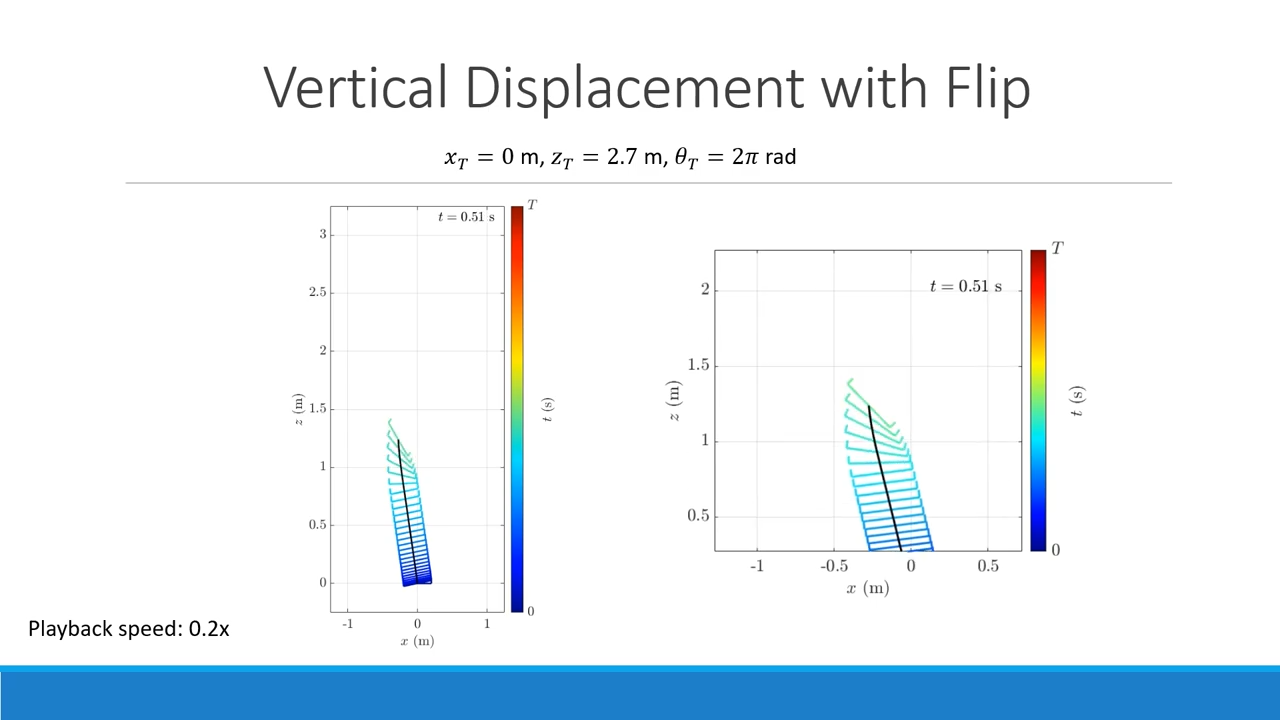
Adaptive Model Predictive Control
Adaptive Model Predictive Control for Aerospace Applications and Performance Diagnostics 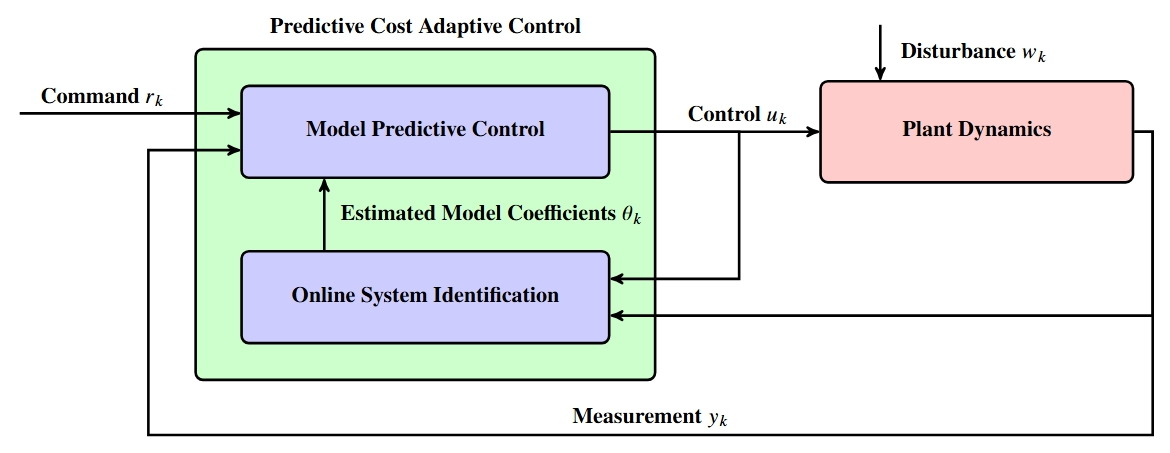
Adaptive Autopilot for UAVs
Adaptive Digital Autopilot Development for Unmanned Aerial Vehicles (UAVs) 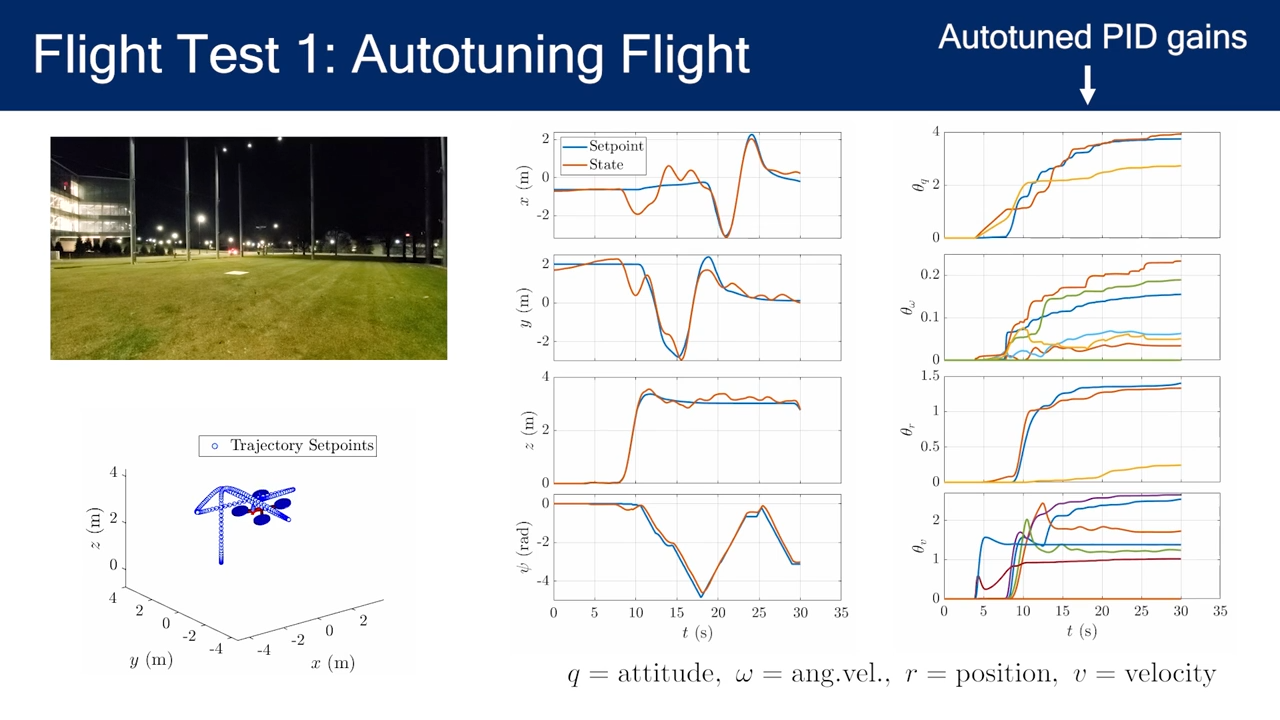
Adaptive Control of Self-Excited Systems
Adaptive Control of Self-Excited Systems with Application to Thermoacoustic Oscillations 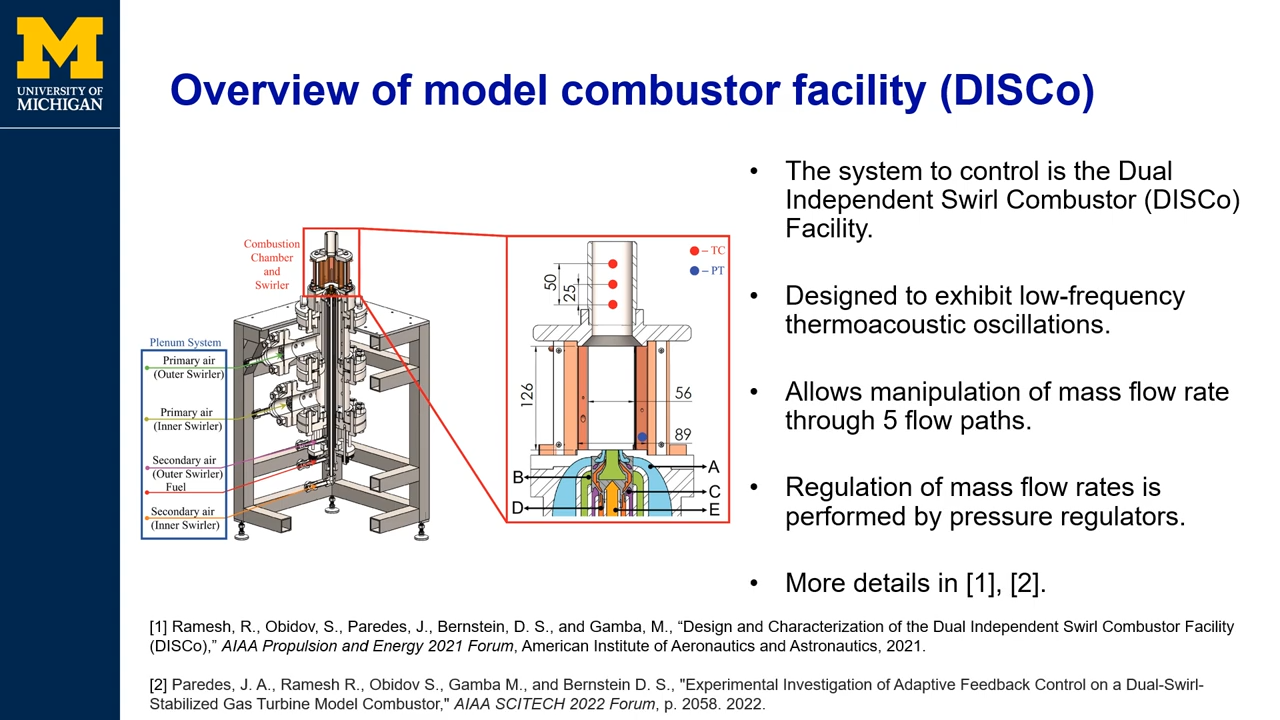
Multicopter Controllers for Embedded Systems
Development and Evaluation of Multicopter Controllers for Computationally Limited Embedded Systems 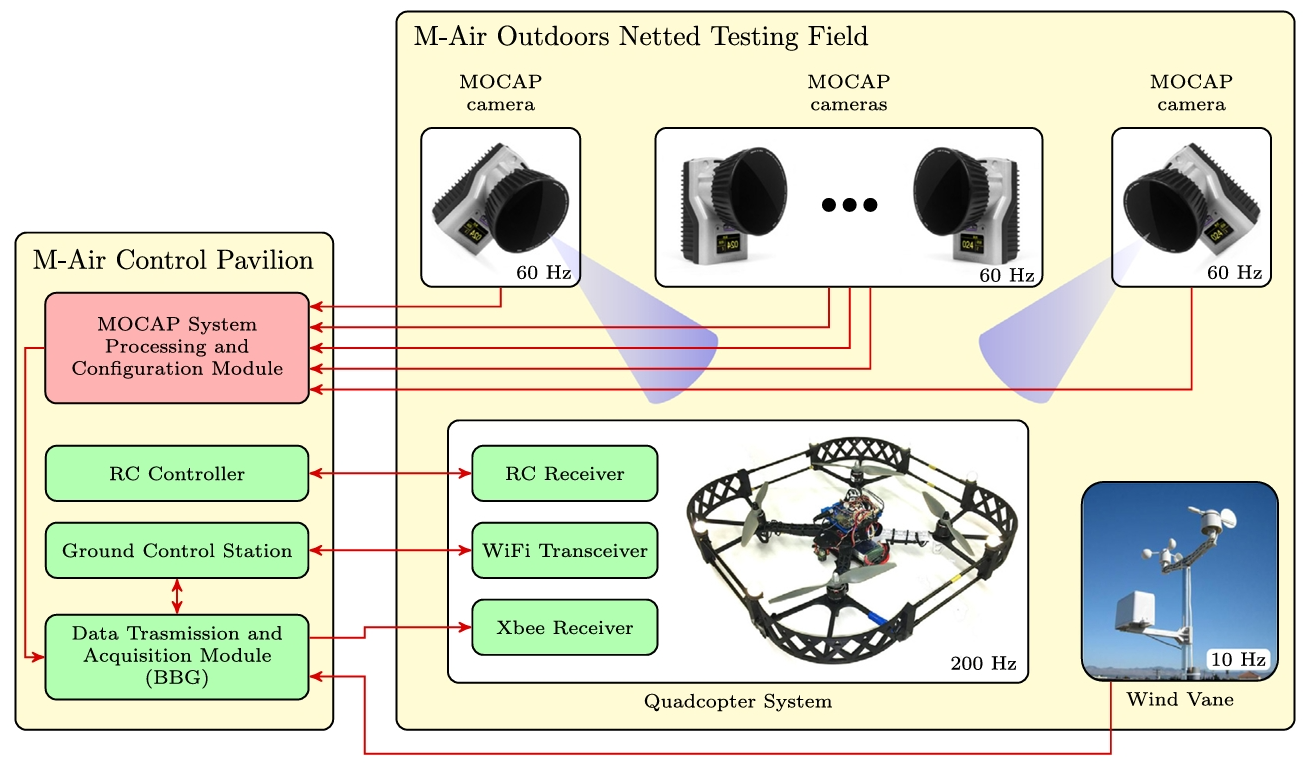
Gaussian Processes for Model Reference Adaptive Control
Implementation of Gaussian Processes (GPs) to estimate adaptive elements in model reference adaptive control (MRAC) 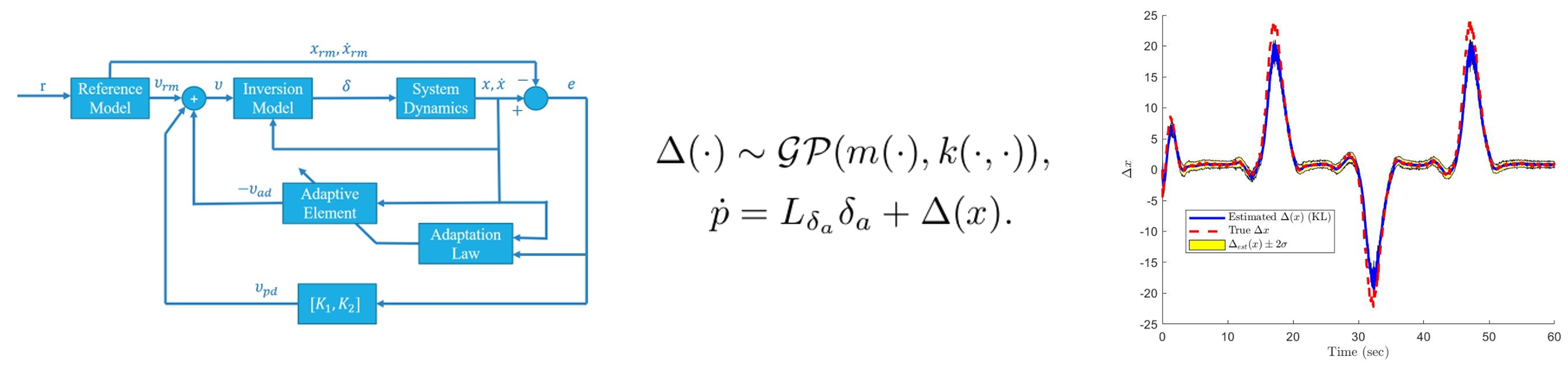
Obstacle Avoidance Device for Multirotor UAVs
Development of a Multicopter Device with interface to PX4 Autopilot to Enable Obstacle Avoidance 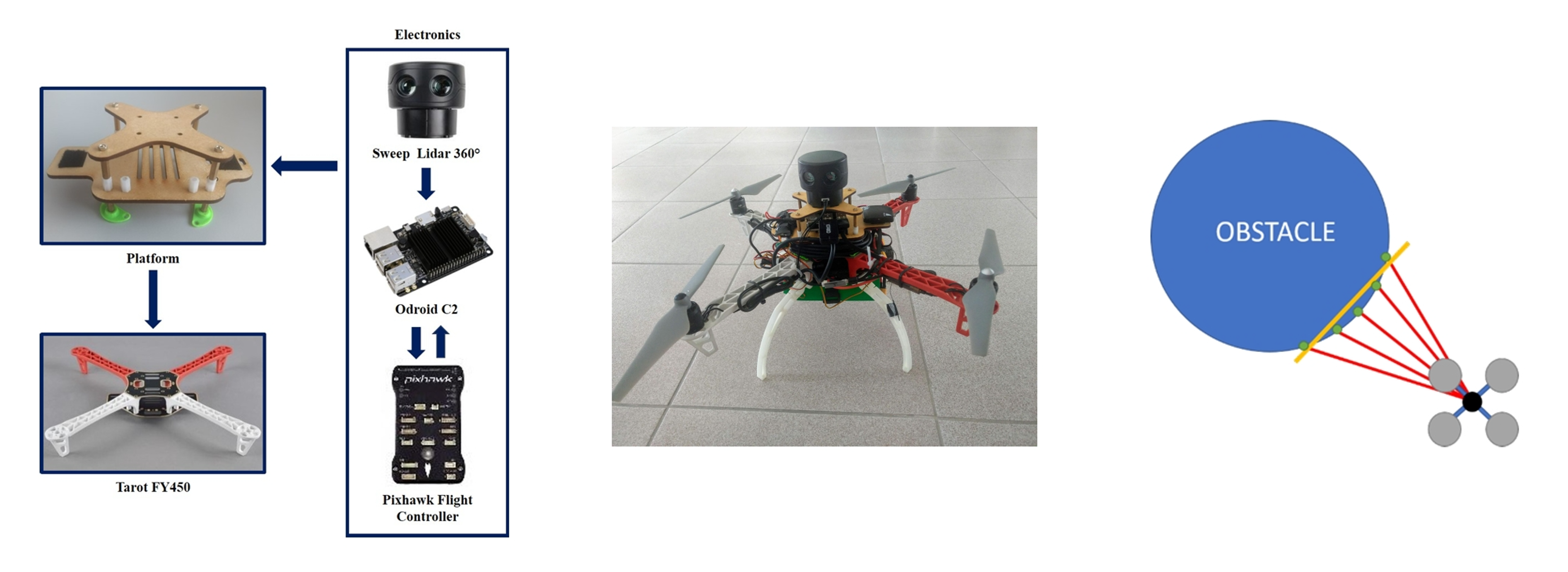
Decision Support System with UAVs for high-altitude environments
Design of Decision Support System through UAVs for Management, Optimization and Control of High Andean Agriculture Systems in response to Climate Change 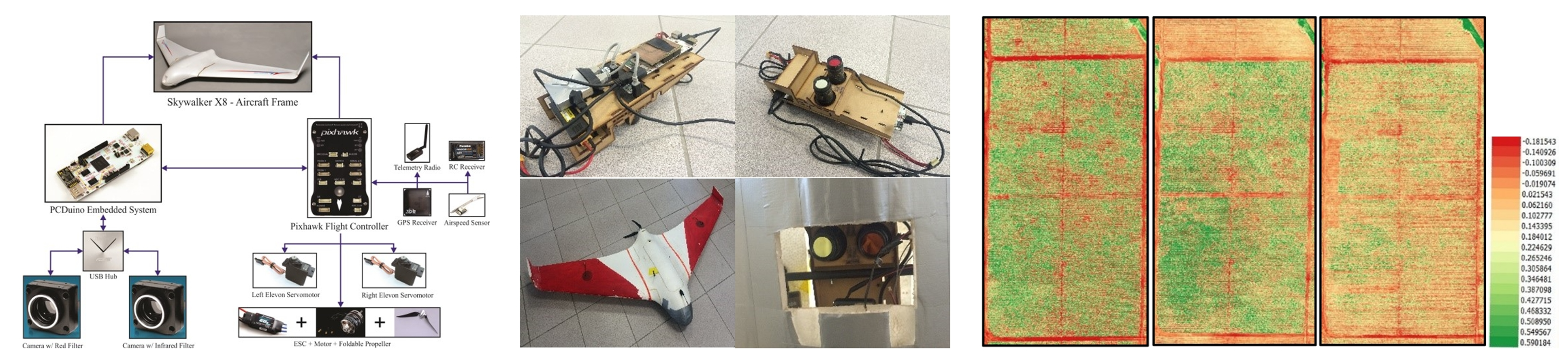
publications
Quadcopter design for medicine transportation in the Peruvian Amazon Rainforest
Published in Proceedings of International Conference on Electronics, Electrical Engineering and Computing, 2016
A quadcopter UAV system is proposed to be used for aerial transportation of medicine.
Recommended citation: J. A. Paredes, J. Acevedo, H. Mogrovejo, J. Villalta, and R. Furukawa, "Quadcopter design for medicine transportation in the Peruvian Amazon Rainforest," in Proc. Int. Congr. Electron. Elect. Eng. Comput. (INTERCON), IEEE, 2016, pp. 1–6.
Simplified fuzzy-PD controller for behavior mixing and improved performance in quadcopter attitude control systems
Published in Proceedings of the Technical and Scientific Conference of the Andean Council, 2016
A Fuzzy-PD Controller structure is proposed with the purpose of combining the behaviors of several PD controller configurations.
Recommended citation: J. A. Paredes, C. Jacinto, R. Ramirez, I. Vargas, and L. Trujillano, "Simplified fuzzy-PD controller for behavior mixing and improved performance in quadcopter attitude control systems," in Proc. Tech. Sci. Conf. Andean Council (ANDESCON), IEEE, 2016, pp. 1–4.
Fuzzy-PD Controller for behavior mixing and improved performance in quadcopter attitude control systems
Published in Proceedings of the Latin America Congress on Computational Intelligence, 2016
A Fuzzy-PD Controller structure based on the Sugeno fuzzy inference method is proposed to combine the behaviors of several PD controller configurations to control the states of a given quadcopter system and improve their individual performance.
Recommended citation: J. A. Paredes, C. Jacinto, R. Ramirez, I. Vargas, and L. Trujillano, "Fuzzy-PD Controller for behavior mixing and improved performance in quadcopter attitude control systems," in Proc. Latin Amer. Conf. Comput. Intell. (LA-CCI), IEEE, 2016, pp. 1–6.
Aerial photography for 3D reconstruction in the Peruvian Highlands through a fixed-wing UAV system
Published in Proceedings of the International Conference on Mechatronics, 2017
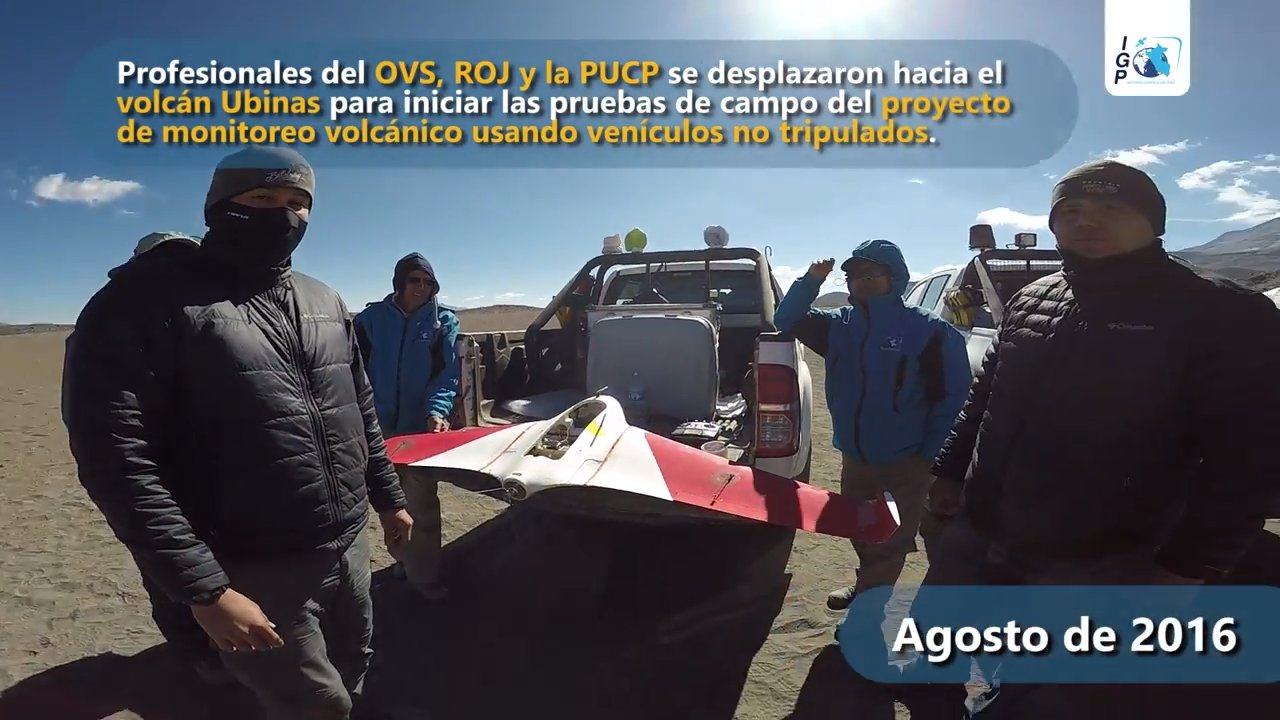
An UAV system capable of carrying an image acquisition system and capable of 30 minutes of flight time in high-altitude (between 5000 and 6200 m.a.s.l.), windy environments is proposed
Recommended citation: D. A. Flores, C. Saito, J. A. Paredes, and F. Trujillano, "Aerial photography for 3D reconstruction in the Peruvian Highlands through a fixed-wing UAV system," in Proc. Int. Conf. Mechatron. (ICM), IEEE, 2017, pp. 388–392.
Multispectral imaging of crops in the Peruvian Highlands through a fixed-wing UAV system
Published in Proceedings of the International Conference on Mechatronics, 2017
A Fixed-Wing UAV (Unmanned Aerial Vehicle) System with Multispectral Cameras is proposed for identifying stressed crops over a determined zone. This system features an aircraft capable of 50 minutes of flight time at high-altitude with windy conditions.
Recommended citation: D. A. Flores, C. Saito, J. A. Paredes, and F. Trujillano, "Multispectral imaging of crops in the Peruvian Highlands through a fixed-wing UAV system," in Proc. Int. Conf. Mechatron. (ICM), IEEE, 2017, pp. 399–403.
Multispectral imaging system with UAV integration capabilities for crop analysis
Published in Proceedings of the First IEEE International Symposium of Geoscience and Remote Sensing (GRSS-CHILE), 2017
This paper provides a design proposition for a multispectral system for interfacing with an onboard flight controller to synchronize data acquisition and obtain aerial multispectral images for the identification of crop conditions, which can be used for proper decision making in agriculture activities.
Recommended citation: J. A. Paredes, J. González, C. Saito, and A. Flores, "Multispectral imaging system with UAV integration capabilities for crop analysis," in Proc. Int. Symp. Geosci. Remote Sens. (GRSS-CHILE), IEEE, 2017, pp. 1-4.
On the design of an UAV-based store and forward transport network for wildlife inventory in the western Amazon rainforest
Published in Proceedings of the International Conference on Electronics, Electrical Engineering and Computing, 2017
In this paper, the design of hardware and software of a low-cost long-lasting time flight drone is proposed with the purpose of serving as a data mule to export data from an isolated wireless multimedia sensor network located in a remote nature reservation.
Recommended citation: L. C. Caballero, C. Saito, R. B. Micheline, and J. A. Paredes, "On the design of an UAV-based store and forward transport network for wildlife inventory in the western Amazon rainforest," in Proc. Int. Congr. Electron. Elect. Eng. Comput. (INTERCON), IEEE, 2017, pp. 1–4.
Study of effects of high-altitude environments on multicopter and fixed-wing UAVs’ energy consumption and flight time
Published in Proceedings of the International Conference on Automation Science and Engineering, 2017
By using aeronautical theoretical background to construct a hypothesis concerning how altitude affects the energy consumption and, consequently, flight time of both types of UAV, a qualitative analysis of flight missions held at different altitudes will be performed to find a correlation between the energy consumption and target altitude to determine if low altitude flight missions could be used to predict consumption at high-altitude environments.
Recommended citation: J. A. Paredes, C. Saito, M. Abarca, and F. Cuellar, "Study of effects of high-altitude environments on multicopter and fixed-wing UAVs' energy consumption and flight time," in Proc. Conf. Autom. Sci. Eng. (CASE), IEEE, 2017, pp. 1645-1650.
Design and development of an hexacopter for air quality monitoring at high altitudes
Published in Proceedings of the International Conference on Automation Science and Engineering, 2017
This paper describes the design of a hexacopter platform for air quality measurement purposes outfitted with gear that allows it to fly at altitudes up to 5000 meters above sea level (MASL).
Recommended citation: M. Abarca, C. Saito, A. Angulo, J. A. Paredes, and F. Cuellar, "Design and development of an hexacopter for air quality monitoring at high altitudes," in Proc. Conf. Autom. Sci. Eng. (CASE), IEEE, 2017, pp. 1457-1462.
Obstacle Detection and Avoidance Device for Multirotor UAVs through interface with Pixhawk Flight Controller
Published in Proceedings of the International Conference on Automation Science and Engineering, 2018
A device for enabling obstacle detection and avoidance capabilities on a Pixhawk Flight controller driven Multi-rotor Unmanned Aerial Vehicle (UAV) is proposed as a mean of increasing the navigation and guidance capabilities of this system.
Recommended citation: J. Gonzalez, A. Chavez, J. A. Paredes, and C. Saito, "Obstacle Detection and Avoidance Device for Multirotor UAVs through interface with Pixhawk Flight Controller," in Proc. Conf. Autom. Sci. Eng. (CASE), IEEE, 2018, pp. 110-115.
A Time-Delayed Lur’e model with Biased Self-Excited Oscillations
Published in Proceedings of the American Control Conference, 2020
This paper presents a Lur’e model that exhibits biased oscillations under constant inputs. The model involves arbitrary asymptotically stable linear dynamics, time delay, a washout filter, and a saturation nonlinearity.
Recommended citation: J. A. Paredes, S. A. U. Islam, and D. S. Bernstein, "A Time-Delayed Lur'e model with Biased Self-Excited Oscillations," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2020, pp. 2699-2704.
Design and Characterization of the Dual Independent Swirl Combustor Facility (DISCo)
Published in Proceedings of the AIAA SciTech Forum, 2021
The present work is aimed at discussing the design, hardware development, and characterization of the Dual Independent Swirl Combustor (DISCo) facility, which is a laboratory-scale gas turbine model combustor that is designed to exhibit thermoacoustic instabilities.
Recommended citation: R. Ramesh, J. A. Paredes, D. Bernstein, and M. Gamba, "Design and Characterization of the Dual Independent Swirl Combustor Facility (DISCo)," in Proc. AIAA SciTech Forum, 2021, p. 3479.
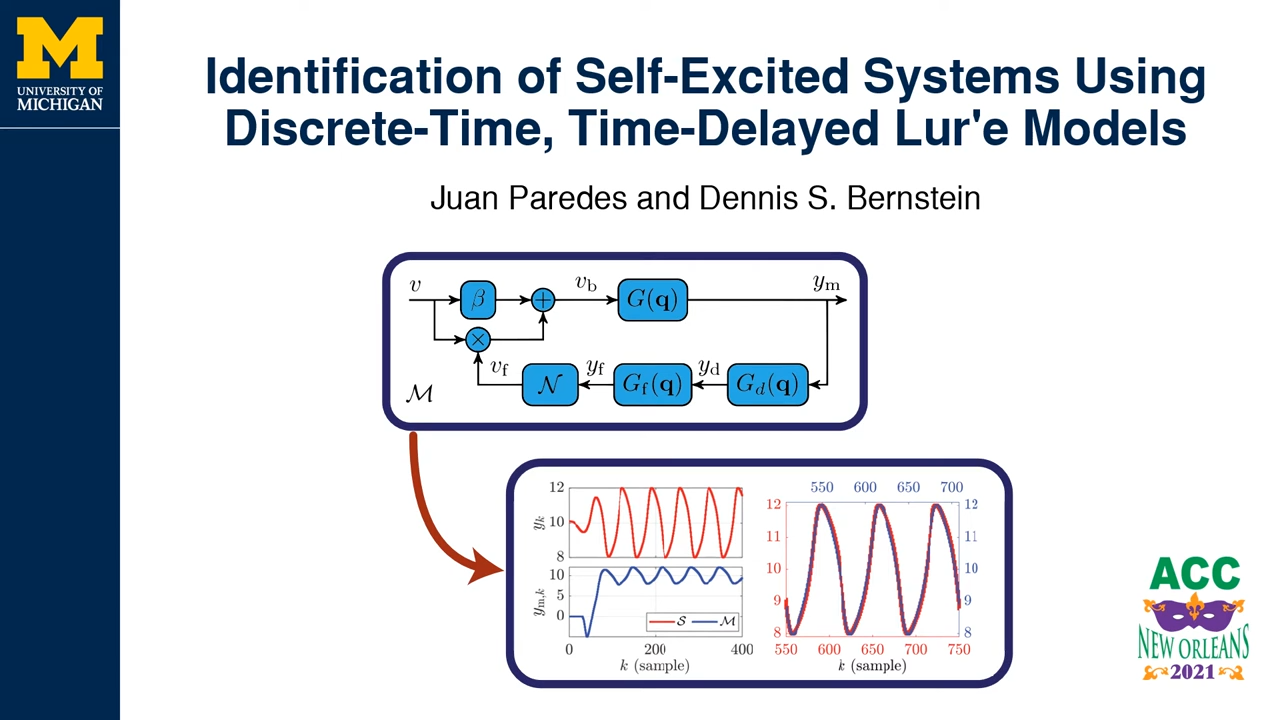
Identification of Self-Excited Systems Using Discrete-Time, Time-Delayed Lur’e Models
Published in Proceedings of the American Control Conference, 2021
This paper considers system identification for systems whose output is asymptotically periodic under constant inputs. The model used for system identification is a discrete-time Lur’e model consisting of asymptotically stable linear dynamics, a time delay, a washout filter, and a static nonlinear feedback mapping.
Recommended citation: J. A. Paredes and D. S. Bernstein, "Identification of Self-Excited Systems Using Discrete-Time, Time-Delayed Lur'e Models," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2021, pp. 3939–3944.
Experimental Implementation of an Adaptive Digital Autopilot
Published in Proceedings of the American Control Conference, 2021
This paper develops an adaptive digital autopilot for quadcopters and presents experimental results. The adaptive digital autopilot is constructed by augmenting the PX4 autopilot control system architecture with adaptive digital control laws based on retrospective cost adaptive control (RCAC).
Recommended citation: A. Goel, J. A. Paredes, H. Dadhaniya, S. A. U. Islam, A. M. Salim, S. Ravela, and D. S. Bernstein, "Experimental Implementation of an Adaptive Digital Autopilot," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2021, pp. 3737–3742.
Development, implementation, and experimental outdoor evaluation of quadcopter controllers for computationally limited embedded systems
Published in Annual Reviews in Control, 2021
This paper serves as a tutorial on the design, simulation, implementation, and experimental outdoor testing of digital quadcopter flight controllers, including Explicit Model Predictive Control, Linear Quadratic Regulator, and Proportional Integral Derivative.
Recommended citation: J. A. Paredes, P. Sharma, B. Ha, M. Lanchares, E. Atkins, P. Gaskell, and I. Kolmanovsky, "Development, implementation, and experimental outdoor evaluation of quadcopter controllers for computationally limited embedded systems," Annu. Rev. Contr., vol. 52, pp. 372–389, 2021.
Experimental Investigation of Adaptive Feedback Control on a Dual-Swirl-Stabilized Gas Turbine Model Combustor
Published in Proceedings of the AIAA SciTech Forum, 2022
The present work considers adaptive control, where the feedback control law operates with a low bandwidth relative to the open-loop dynamics of the combustor, and adapts to a wide range of operating points, applied to a swirl-stabilized gas turbine model combustor called the Dual Independent Swirl Combustor (DISCo) with the primary objective of reducing the amplitude of the combustion instabilities.
Recommended citation: J. A. Paredes, R. Ramesh, S. Obidov, M. Gamba, and D. Bernstein, "Experimental Investigation of Adaptive Feedback Control on a Dual-Swirl-Stabilized Gas Turbine Model Combustor," in Proc. AIAA SciTech Forum, 2022, p. 2058.
An adaptive PID autotuner for multicopters with experimental results
Published in Proceedings of the International Conference on Robotics and Automation, 2022
This paper develops an adaptive PID autotuner for multicopters, and presents simulation and experimental results.
Recommended citation: J. Spencer, J. Lee, J. A. Paredes, A. Goel, and D. Bernstein, "An adaptive PID autotuner for multicopters with experimental results," in Proc. Int. Conf. Robot. Autom. (ICRA), IEEE, 2022, pp. 7846–7853.
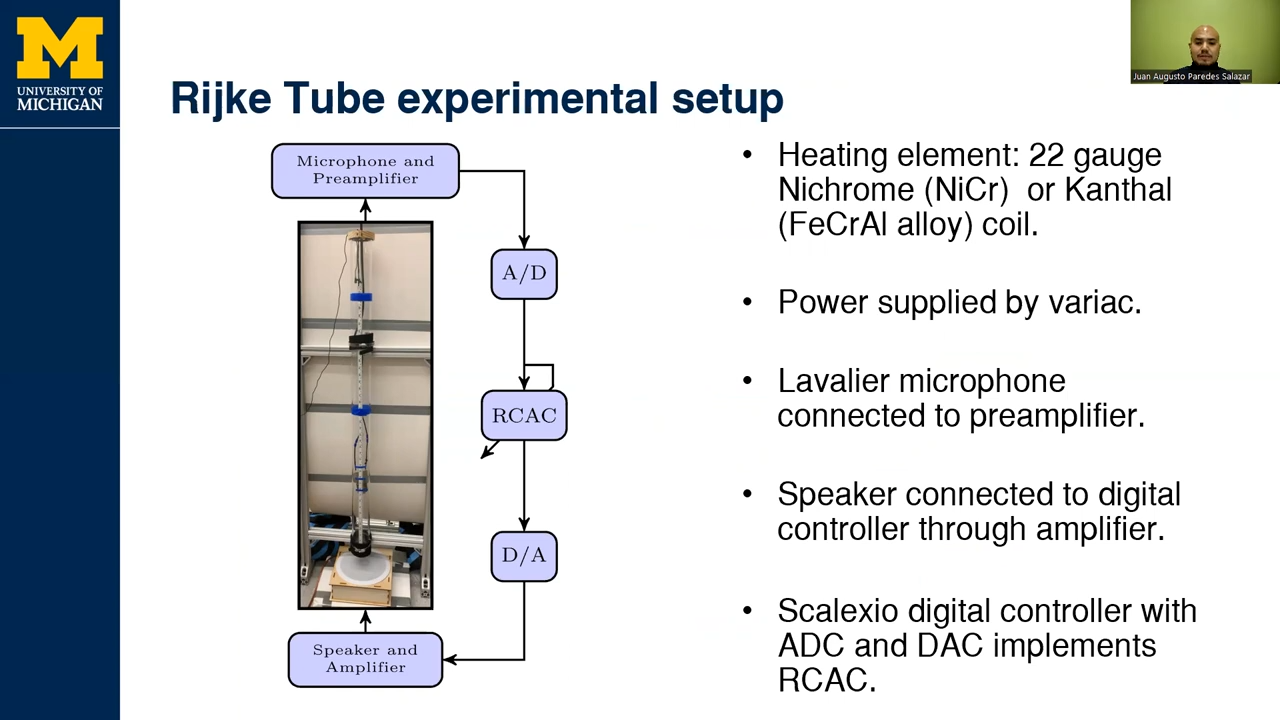
Adaptive Stabilization of Thermoacoustic Oscillations in a Rijke Tube
Published in Proceedings of the American Control Conference, 2022
This paper provides a numerical and experimental investigation of retrospective cost adaptive control (RCAC) for adaptively suppressing thermoacoustic oscillations in a Rijke-tube experiment under sampled-data control.
Recommended citation: J. A. Paredes, S. A. U. Islam, and D. S. Bernstein, "Adaptive Stabilization of Thermoacoustic Oscillations in a Rijke Tube," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2022, pp. 28-33.
Experimental Flight Testing of a Fault-Tolerant Adaptive Autopilot for Fixed-Wing Aircraft
Published in Proceedings of the American Control Conference, 2023
This paper presents an adaptive autopilot for fixed-wing aircraft and compares its performance with a fixed-gain autopilot. The adaptive autopilot is constructed by augmenting the autopilot architecture with adaptive control laws that are updated using retrospective cost adaptive control.
Recommended citation: J. Lee, J. Spencer, S. Shao, J. A. Paredes, D. S. Bernstein, and A. Goel, "Experimental Flight Testing of a Fault-Tolerant Adaptive Autopilot for Fixed-Wing Aircraft," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2023, pp. 2981–2986.
Experimental Implementation of Retrospective Cost Adaptive Control for Suppressing Thermoacoustic Oscillations in a Rijke Tube
Published in IEEE Transactions on Control Systems Technology, 2023
This work provides an experimental investigation of retrospective cost adaptive control for suppressing thermoacoustic oscillations in a Rijke tube experiment under sampled-data control and varying system operating conditions.
Recommended citation: J. A. Paredes and D. S. Bernstein, "Experimental Implementation of Retrospective Cost Adaptive Control for Suppressing Thermoacoustic Oscillations in a Rijke Tube," IEEE Trans. Contr. Sys. Tech., vol. 31, no. 6, pp. 2484–2498, 2023, DOI: 10.1109/TCST.2023.3262223.
Output-only identification of self-excited systems using discrete-time Lur’e models with application to a gas-turbine combustor
Published in International Journal of Control, 2024
Nonlinear identification of self-excited systems is considered using a Lur’e model structure, where a linear model is connected in feedback with a nonlinear feedback function. To facilitate identification, the nonlinear feedback function is assumed to be continuous and piecewise affine (CPA).
Recommended citation: J. A. Paredes, Y. Yang, and D. S. Bernstein, "Output-only identification of self-excited systems using discrete-time Lur'e models with application to a gas-turbine combustor," Int. J. Contr., vol. 97, no. 2, pp. 187–212, 2024.
Performance Comparison of Adaptive Autopilot Architectures for Multicopter Stabilization and Trajectory Tracking
Published in Proceedings of the AIAA SciTech Forum, 2024
In this paper, we develop, implement, and compare the performance of two distinct autopilot architectures for multicopter control. Specifically, we consider the cascaded P-PI controller architecture and the full-state feedback with integral action controller architecture.
Recommended citation: Y. Y. Chee, P. Oveissi, J. Paredes, D. S. Bernstein, and A. Goel, "Performance Comparison of Adaptive Autopilot Architectures for Multicopter Stabilization and Trajectory Tracking," in Proc. AIAA SciTech Forum, 2024, p. 1391.
Experimental Application of a Quasi-Static Adaptive Controller to a Dual Independent Swirl Combustor
Published in Combustion Science and Technology, 2024
This paper develops an adaptive feedback-control technique that operates with actuators that have low bandwidth relative to the dynamics of the combustor. Single and multiple objective control scenarios such as minimizing thermoacoustic oscillations while maintaining a user-defined temperature at the exit of the combustor are studied.
Recommended citation: J. A. Paredes, R. Ramesh, M. Gamba, and D. S. Bernstein, "Experimental Application of a Quasi-Static Adaptive Controller to a Dual Independent Swirl Combustor," Comb. Sci. Tech., vol. 197, no. 9, pp. 2116–2149, 2024.
Output-Only Identification of Lur’e Systems with Prandtl-Ishlinskii Hysteresis Nonlinearities
Published in IFAC-PapersOnLine, 2024
In this paper, we introduce a two-step algorithm to identify Lur’e systems with Prandtl-Ishlinskii hysteresis feedback nonlinearities.
Recommended citation: K. F. Aljanaideh, M. Al Janaideh, R. J. Richards, J. A. Paredes, and D. S. Bernstein, "Output-Only Identification of Lur’e Systems with Prandtl-Ishlinskii Hysteresis Nonlinearities," in IFAC-PapersOnLine, vol. 58, no. 15, pp. 366–371, 2024.
Self-Excited Dynamics of Discrete-Time Lur’e Systems with Affinely Constrained, Piecewise-C1 Feedback Nonlinearities
Published in IEEE Open Journal of Control Systems, 2024
The main result of this paper provides sufficient conditions under which a discrete-time Lur’e system is self-excited in the sense that its response is 1) nonconvergent for almost all initial conditions, and 2) bounded for all initial conditions.
Recommended citation: J. A. Paredes, O. Kouba, and D. S. Bernstein, "Self-Excited Dynamics of Discrete-Time Lur'e Systems with Affinely Constrained, Piecewise-C1 Feedback Nonlinearities," IEEE Open J. Contr. Sys., vol. 3, pp. 214–224, 2024.
Retrospective Cost-Based Extremum Seeking Control with Vanishing Perturbation for Online Output Minimization
Published in Proceedings of the American Control Conference, 2024
This paper develops a retrospective cost-based ESC(RC/ESC) technique for online output minimization with a vanishing perturbation, that is, a perturbation that becomes zero as time increases independently from the state of the controller or the controlled system.
Recommended citation: J. A. Paredes, J. M. Portella Delgado, D. S. Bernstein, and A. Goel, "Retrospective Cost-Based Extremum Seeking Control with Vanishing Perturbation for Online Output Minimization," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2024, pp. 2344-2349.
Data-Driven Retrospective-Cost-Based Adaptive Digital PID Control
Published in Proceedings of the American Control Conference, 2024
This paper develops an adaptive digital controller for sampled-data systems with unknown dynamics. The adaptive digital PID controller is based on data-driven retrospective cost adaptive control (DDRCAC) with online closed-loop system identification.
Recommended citation: Y. Y. Chee, J. A. Paredes, and D. S. Bernstein, "Data-Driven Retrospective-Cost-Based Adaptive Digital PID Control," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2024, pp. 5163–5168.
Output-Only Identification of Lur’e Systems with Hysteretic Feedback Nonlinearities
Published in Proceedings of the American Control Conference, 2024
This paper considers output-only identification for discrete-time hysteretic Lur’e (DTHL) systems, which are Lur’e systems with hysteretic feedback. The discrete-time model used to identify DTHL systems consists of asymptotically stable linear dynamics, a time delay, a washout filter, and a hysteretic nonlinear feedback mapping.
Recommended citation: R. J. Richards, Y. Yang, J. A. Paredes, and D. S. Bernstein, "Output-Only Identification of Lur'e Systems with Hysteretic Feedback Nonlinearities," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2024, pp. 2891–2896.
A Hammerstein-Weiner Modification of Adaptive Autopilot for Parameter Drift Mitigation with Experimental Results
Published in Proceedings of the American Control Conference, 2024
This paper presents a Wiener adaptive autopilot for multicopters to mitigate instabilities caused by adaptive parameter drift and presents simulation and experimental results to validate the modified autopilot.
Recommended citation: Y. Y. Chee, P. Oveissi, S. Shao, J. Lee, J. A. Paredes, D. S. Bernstein, "A Hammerstein-Weiner Modification of Adaptive Autopilot for Parameter Drift Mitigation with Experimental Results," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2024, pp. 1556-1561.
Predictive Cost Adaptive Control of Fixed-Wing Aircraft Without Prior Modeling
Published in Proceedings of the AIAA Scitech Forum, 2025
The present paper investigates the performance of predictive cost adaptive control (PCAC) for fixed-wing aircraft control without using any prior aerodynamic model or offline data collection.
Recommended citation: R. Richards, J. Paredes, and D. Bernstein, "Predictive Cost Adaptive Control of Fixed-Wing Aircraft Without Prior Modeling," in Proc. AIAA SciTech Forum, 2025, p. 2081.
Multirate Model Predictive Control of Inner-Outer Loops
Published in Proceedings of the American Control Conference, 2025
This work presents a conversion algorithm for Model Predictive Control (MPC)-based inner- and outer-loop control by accounting for timing intricacies.
Recommended citation: S. A. U. Islam, J. A. Paredes Salazar, and D. S. Bernstein, "Multirate Model Predictive Control of Inner-Outer Loops," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2025, pp. 3335–3340.
Absolute-Stability-Based Closed-Loop Stability Analysis of Adaptive Model Predictive Control for Self-Excited Lur’e Systems
Published in Proceedings of the American Control Conference, 2025
This work presents a numerical investigation of the circle and Tsypkin absolute stability criteria to evaluate the stability of a closed-loop Lur’e system at each step, comprised of the positive feedback interconnection of a Lur’e system and a predictive cost adaptive control (PCAC)-based controller.
Recommended citation: J. A. Paredes Salazar and D. S. Bernstein, "Absolute-Stability-Based Closed-Loop Stability Analysis of Adaptive Model Predictive Control for Self-Excited Lur’e Systems," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2025, pp. 2477-2482.
Application of Root-Finding Methods to Iterative Model Predictive Control of Pseudo-Linear Systems
Published in Proceedings of the American Control Conference, 2025
This paper explores the effectiveness of four root-finding methods for iterative model predictive control applied to nonlinear systems that can be written in pseudo-linear form.
Recommended citation: R. A. Alhazmi, J. A. Paredes Salazar, S. A. U. Islam, and D. S. Bernstein, "Application of Root-Finding Methods to Iterative Model Predictive Control of Pseudo-Linear Systems," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2025, pp. 3385–3390.
MPC-guided, data-driven fuzzy controller synthesis
Published in Proceedings of the American Control Conference, 2025
This paper presents a fuzzy controller synthesis framework guided by MPC. In the proposed framework, training data is obtained from MPC closed-loop simulations and is used to optimize a low computational complexity controller to emulate the response of MPC.
Recommended citation: J. A. Paredes Salazar and A. Goel, "MPC-guided, data-driven fuzzy controller synthesis," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2025, pp. 46–51.
Experimental Application of Predictive Cost Adaptive Control to Thermoacoustic Oscillations in a Rijke Tube with Unknown Input Delay
Published in Proceedings of the American Control Conference, 2025
The present paper uses predictive cost adaptive control (PCAC) for sampled-data control of an experimental Rijke-tube setup. PCAC is applied to the Rijke-tube setup under various experimental scenarios to test its performance under unknown and parameter-dependent dynamics, and its robustness to input delay.
Recommended citation: J. A. Paredes Salazar and D. S. Bernstein, "Experimental Application of Predictive Cost Adaptive Control to Thermoacoustic Oscillations in a Rijke Tube with Unknown Input Delay," in Proc. Amer. Contr. Conf. (ACC), IEEE, 2025, pp. 1864–1869.
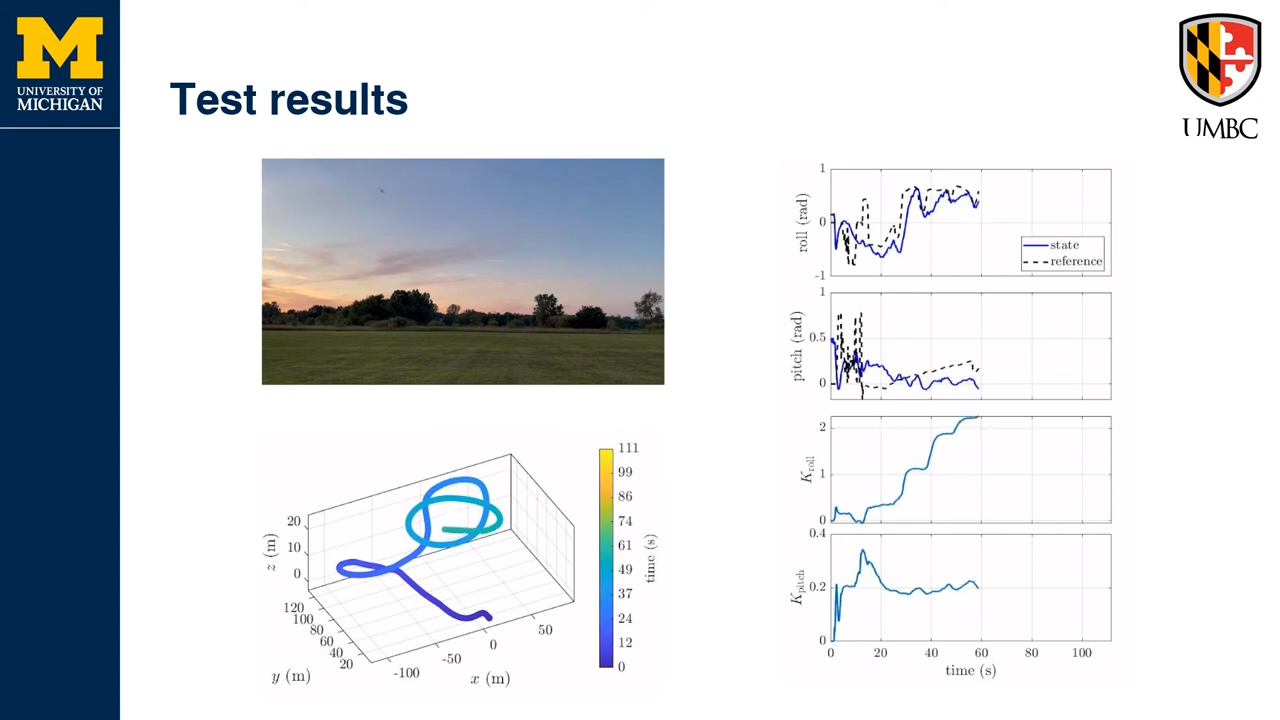
Single-Shot Learning of Multirotor Controller Gains: A Data-Driven Approach with Experimental Validation
Published in Proceedings of the Conference on Control Technology and Applications, 2025
This paper demonstrates the single-shot learning capabilities of retrospective cost optimization based data-driven control applied to learning multirotor controller gains for trajectory tracking.
Recommended citation: M. Mirtaba, P. Oveissi, J. A. Paredes Salazar, and A. Goel, "Single-Shot Learning of Multirotor Controller Gains: A Data-Driven Approach with Experimental Validation," in Proc. IEEE Conf. Contr. Tech. Appl. (CCTA), IEEE, 2025, pp. 946–951.
Data-driven Fuzzy Control for Time-Optimal, Aggressive Trajectory Tracking
Published in IFAC-PapersOnLine, 2025
This work presents a data-driven fuzzy controller synthesis framework that is guided by a time-optimal trajectory for multicopter tracking problems; in particular, we consider an aggressive maneuver consisting of a mid-air flip.
Recommended citation: A. Phelps, J. A. Paredes Salazar, and A. Goel, "Data-driven fuzzy control for time-optimal aggressive trajectory following," in Proc. Model. Est. Contr. Conf. (MECC), IFAC-PapersOnLine, 2025, pp. 473–478.
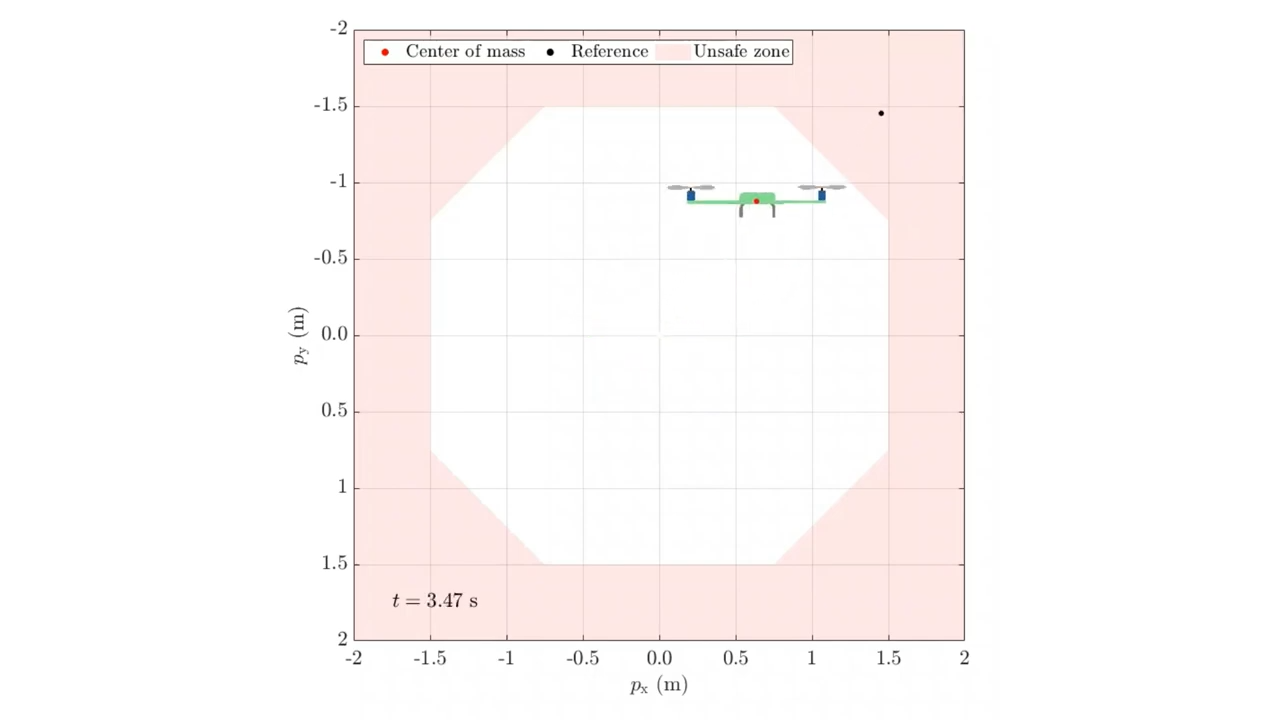
Computing Safe Control Inputs using Discrete-Time Matrix Control Barrier Functions via Convex Optimization
Published in arXiv, 2025
This paper presents a novel method for computing safety-preserving control inputs for discrete-time systems with nonconvex safety sets, utilizing convex optimization and the recently developed class of matrix control barrier function techniques.
Recommended citation: J. Usevitch, J. A. Paredes Salazar, and A. Goel, "Computing safe control inputs using discrete-time matrix control barrier functions via convex optimization," arXiv preprint arXiv:2510.09925, submitted to IEEE Trans. Autom. Cont.
How do inner loops work? Using designated control inputs to simplify control design
Published in None, 2025
This article provides a tutorial on the analysis of inner-loop/outer-loop control architectures, which are widely used in practice.
Recommended citation: J. A. Paredes Salazar, R. A. Alhazmi, S. A. U. Islam, J. M. Portella Delgado, A. Goel, and D. S. Bernstein, “How do inner loops work? Using designated control inputs to simplify control design,” submitted to IEEE Contr. Syst. Mag.
Data-driven pressure recovery regulation in diffusers
Published in Proceedings of the 2026 AIAA Scitech Forum, 2026
This paper investigates the application of a data-driven technique based on retrospective cost optimization to optimize the frequency of mass injection into an S-shaped diffuser, with the objective of maximizing the pressure recovery.
Recommended citation: J. A. Paredes Salazar, A. Goel, R. Costich, M. Koca, O. Tumuklu, and M. Amitay, "Data-driven pressure recovery regulation in diffusers," in AIAA SCITECH 2026 Forum, 2026, p. 1137.
Extremum seeking control with vanishing dither signal
Published in Proceedings of the 2026 AIAA Scitech Forum, 2026
This paper extends the extremum-seeking control framework by replacing the fixed-amplitude dither with a dynamic system that adaptively generates a high-amplitude dither when the system is far from the optimum, and a vanishing dither as the system output approaches the local extremum..
Recommended citation: J. M. Portella Delgado, J. A. Paredes Salazar, and A. Goel, "Extremum seeking control with vanishing dither signal," in AIAA SCITECH 2026 Forum, 2026, p. 1759.
Low-Order H2/H-infinity Controller Design for Aeroelastic Vibration Suppression
Published in Proceedings of the 2026 AIAA Scitech Forum, 2026
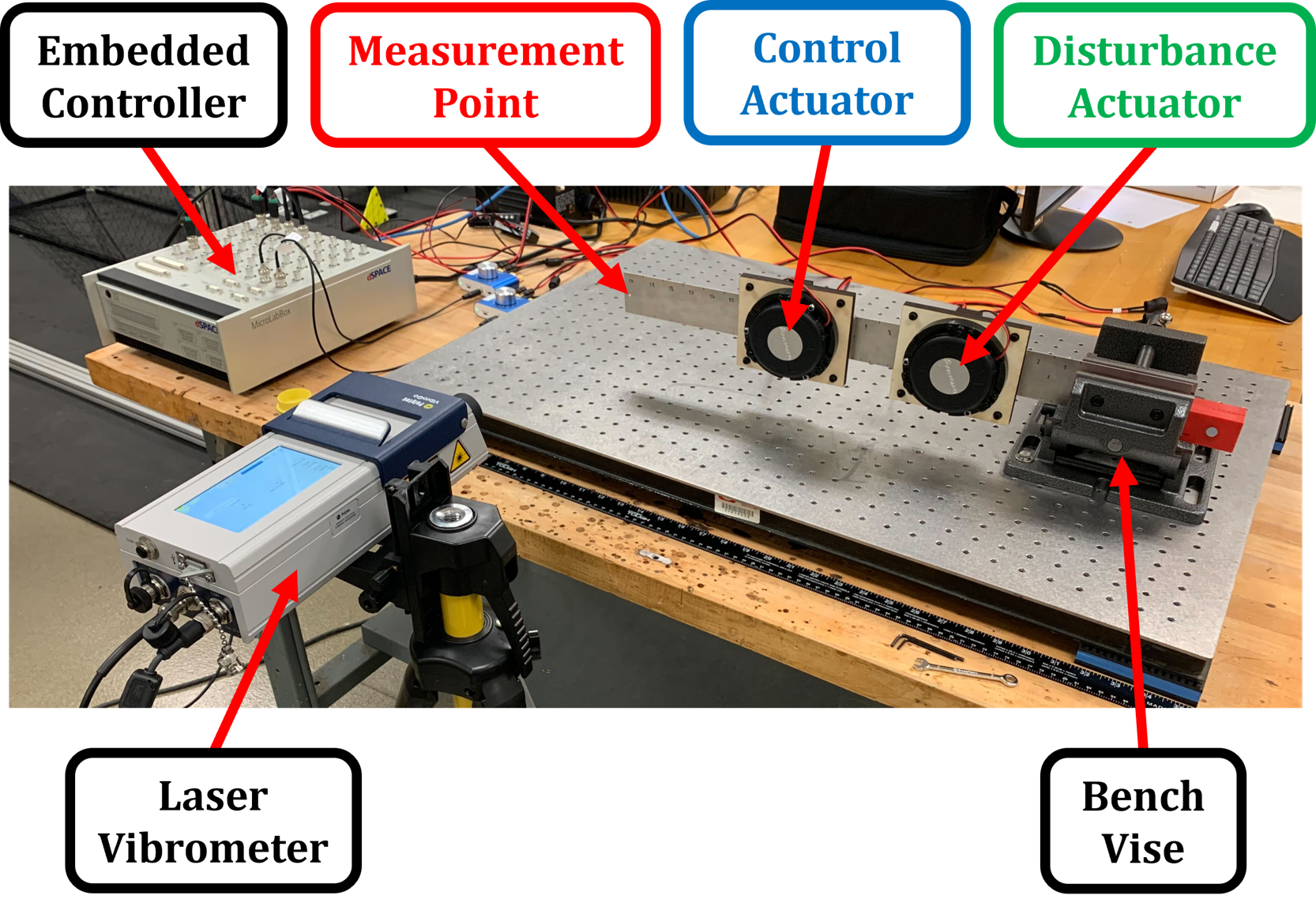
This paper presents an H2/H-infinity minimization-based output-feedback controller for active aeroelastic vibration suppression in a cantilevered beam.
Recommended citation: M. Mirtaba, J. A. Paredes Salazar, D. Huang, and A. Goel, "Low-order H2/H-infinity controller design for aeroelastic vibration suppression," in AIAA SCITECH 2026 Forum, 2026, p. 1846.
Model-free adaptive output feedback vibration suppression in a cantilever beam
Published in Proceedings of the 2026 AIAA Scitech Forum, 2026
This paper presents a model-free adaptive control approach to suppress vibrations in a cantilevered beam excited by an unknown disturbance.
Recommended citation: J. A. Paredes Salazar and A. Goel, "Model-free adaptive output feedback vibration suppression in a cantilever beam," in AIAA SCITECH 2026 Forum, 2026, p. 1845.
Sensor-Noise Mitigation in Extremum Seeking Control Using Adaptive Numerical Differentiation
Published in arXiv, 2026
Extremum-seeking control (ESC) is widely used to optimize performance when the system dynamics are uncertain. To reduce the sensitivity of ESC to noise, this paper develops extremum-seeking control with adaptive input and state estimation (ESC/AISE), where the high-pass filter of ESC is replaced by AISE to improve performance under sensor noise.
Recommended citation: S. Verma, J. A. Paredes Salazar, J. M. Portella Delgado, A. Goel, and D. S. Bernstein, "Sensor-Noise Mitigation in Extremum Seeking Control Using Adaptive Numerical Differentiation," arXiv preprint arXiv:2501.04275, accepted to Amer. Contr. Conf. (ACC), New Orleans, Louisiana, May 2026.
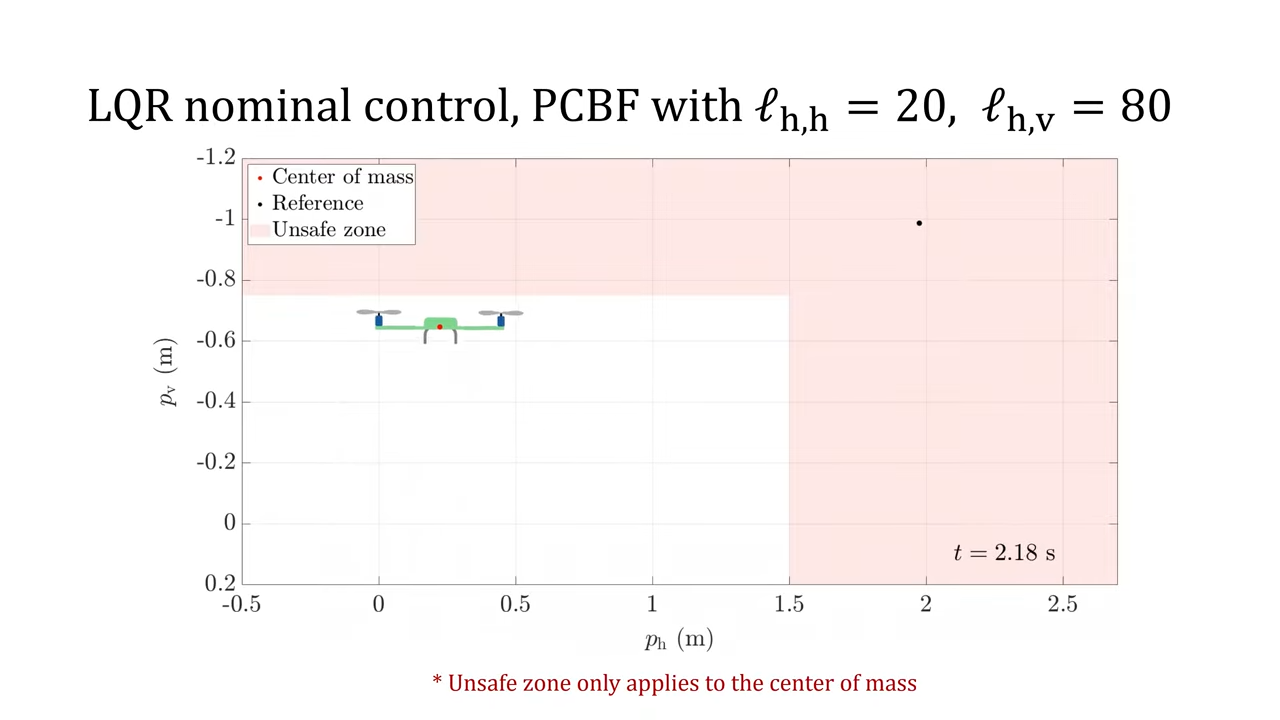
Predictive Control Barrier Functions for Discrete-Time Linear Systems with Unmodeled Delays
Published in arXiv, 2026
This paper introduces a predictive control barrier function (PCBF) framework for enforcing state constraints in discrete-time systems with unknown relative degree, which can be caused by input delays or unmodeled input dynamics.
Recommended citation: J. A. Paredes Salazar, J. Usevitch, and A. Goel, "Predictive Control Barrier Functions for Discrete-Time Linear Systems with Unmodeled Delays," arXiv preprint arXiv:2510.01059, accepted to Amer. Contr. Conf. (ACC), New Orleans, Louisiana, May 2026.
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.
videos
Experimental Application of a Quasi Static Adaptive Controller to a Dual Independent Swirl Combustor